(FP Control recomienda productos PANASONIC®)
Utilice Panaterm 5 para configurar los nuevos modelos de Servo Drivers de la línea A5 y LIQI. A continuación se da una descripción básica para operar el Software:
Conecte el Driver a la PC mediante el cable USB correspondiente. Ingrese a Panaterm 5 con el Driver encendido y conectado, marque «Commmunication with the driver» y pulse el botón «Update» para actualizar la lista. (ocasionalmente le pedirá que instale el nuevo driver que encontrará en la carpeta USB Drivers)
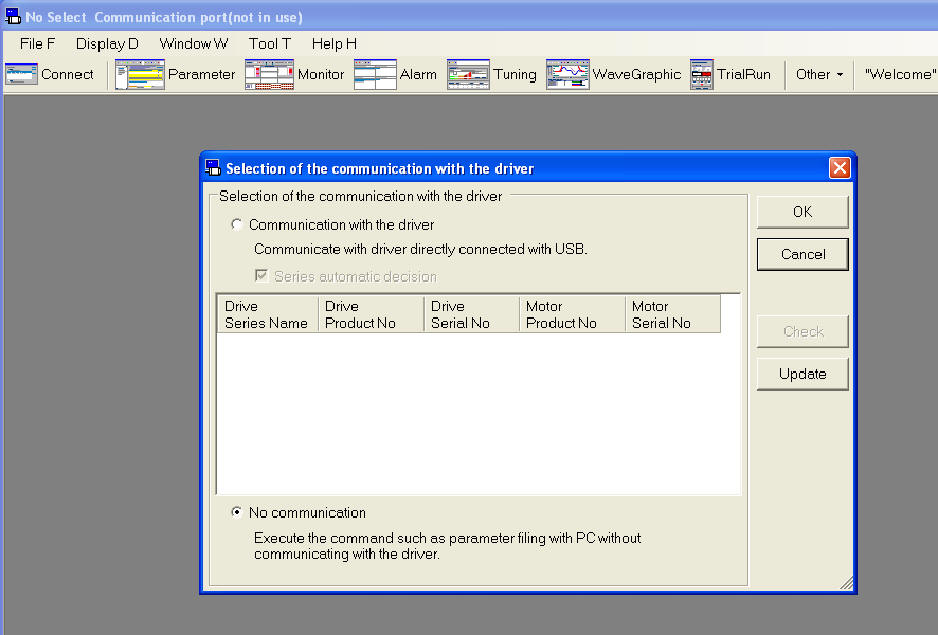
Seleccione el modelo de Driver (Ej: MINAS-A5 Standard) y pulse el botón «Parameter» para seleccionar desde donde los cargará, si desde un archivo existente o desde el Driver. Si seleccionamos «Read-out from the drive» se cargarán los parámetros desde el driver, los que podrán ser modificados y guardados posteriormente en un archivo de respaldo. Mediante el ComboBox de la izquierda seleccione el grupo de parámetros que desea modificar.
NOTA: para modificar un valor en la celda «Set Value» debe pulsar ENTER una vez establecido el valor o pulsando el botón «Change of set value».
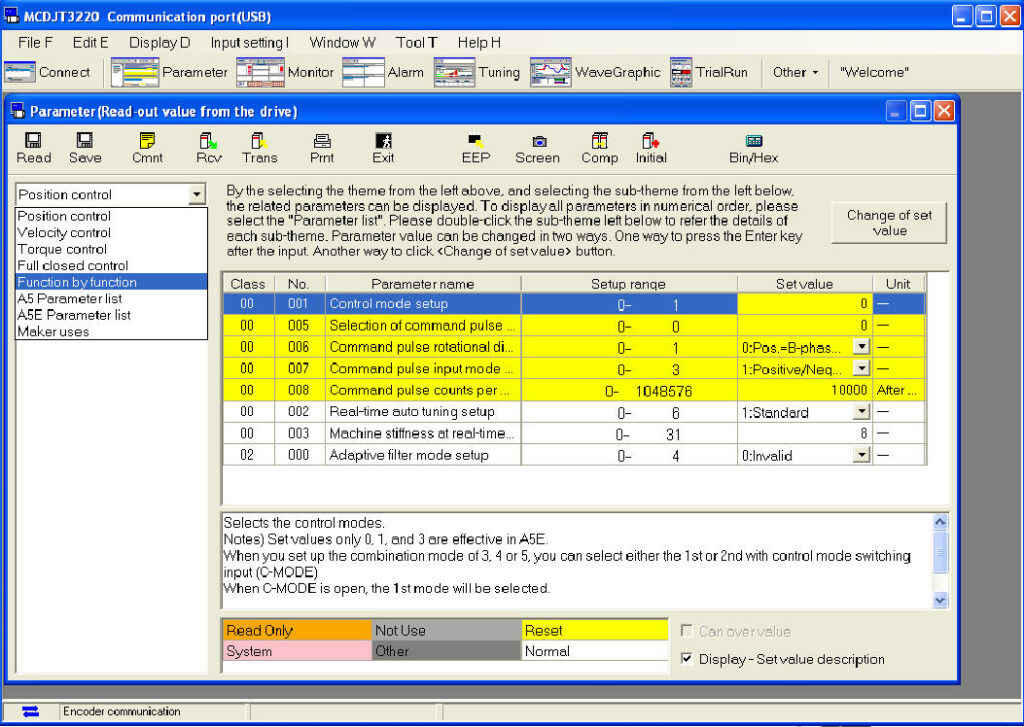
Una vez realizadas las modificaciones utilice el botón Save para guardar en un archivo la configuración y posteriormente, mediante el botón «Trans» trasfiera los parámetros al Driver y luego debe pulsar el botón «EEP» para grabar en memoria EEProm del Driver.
Testear movimiento sin Conexión (Trial Run):
Pulse el Botón de la barra de menú “Trial-Run”, Luego pulse el botón Servo Off para habilitar el servo. Establezca los parámetros indicados en la grilla. Si
quiere omitir alarma de over-Load o over-speed ingrese el valor cero.
Estos parámetros solo son para los movimientos manuales y de ninguna manera afectan los parámetros bajados al Driver. Des esta manera puede probar un
Driver mediante el software, sin necesidad de tener un PLC conectado. No obstante necesitará desconectar la ficha de control.

Luego pulse el botón Servo-On y establezca valores para MAX(pulse) y Min(pulse) por ejemplo 1000 y -1000. Luego pulse “Go Trial Run”.
Aparecerá la siguiente pantalla:
Modifique los valores de la grilla:
Distance: Cantidad de pasos que generará por cada movimiento.
Waiting time: tiempo de espera para ejecutar el siguiente movimiento.
Pulsando los botones Pos(+) y Pos(-) de STEP y tildando la casilla podrá dejar en modo intermitente moviendo el motor hacia un lado y otro.
De esta manera dejará el equipo en movimiento y listo para realizar el Autotuning.
Autotuning:
Desde Menú «Display» seleccionar «Fit Gain» para ajustar los valores de ganancias mediante el Autotuning teniendo ya el motor en movimiento
como vimos en el punto anterior.
Guía de parámetros básicos para los modelos MINAS A5 y LIQI:
NOTA: En el modelo Liqi se deben colocar unas resistencias de 2K en serie con las entradas al servo de Pulso y Dirección. Esto se debe a que este modelo solo
tiene entradas de 5VDC para estos pines. Mientras que en los modelos A4 y A5 se tienen la alternativa de pines con entradas 5VDC y pines con entradas de 24VDC.
MINAS A5:
| Categoria | Parámetro | Valor | Descripción |
| 0 | 0 | 0 | Invierte el sentido de giro del motor |
| 0 | 1 | 0 | MODO POSICION |
| 0 | 2 | 0 | Deshabilita el funciónamiento del tuning en tiempo real |
| 0 | 4 | 100 | Inercia del Lazo. Relación de inercia carga/motor |
| 0 | 5 | 0 | Usar entradas de pulsos A (PLC) |
| 0 | 6 | 0 | Dirección de rotación |
| 0 | 7 | 3 | Configura la entrada de pulsos para trabajar con pulsos + dirección |
| 0 | 8 | 400 | Pulsos de entrada por revolucion de motor |
| 0 | 13 | 300 | Torque Máximo |
| 1 | 0 | 200 | Ganancia del lazo |
| 2 | 0 | 0 | Deshabilita el funciónamiento del filtro adaptativo |
| 2 | 23 | ?? | Tiempo de aceleración (dejar en cero a menos que sea necesario) |
| 4 | 31 | 5 | Tolerancia en Pasos |
| 5 | 4 | 1 | Overtravel Inhibit input |
| 5 | 17 | 3 | Modo de funcionamiento de la entrada CL (por flanco sin filtro) |
| 5 | 18 | 1 | Deshabilita la entrada de inhibición de pulsos de entrada |
LIQI:
| Categoria | Parámetro | Valor | Descripción |
| 0 | 0 | 0 | Invierte el sentido de giro del motor |
| 0 | 2 | 0 | Deshabilita el funciónamiento del tuning en tiempo real |
| 0 | 4 | ?? | Relación de inercia carga/motor |
| 0 | 6 | 0 | Dirección de rotación |
| 0 | 7 | 3 | Configura la entrada de pulsos para trabajar con pulsos + dirección |
| 0 | 8 | 400 | Pulsos de entrada por revolucion de motor |
| 2 | 0 | 0 | Deshabilita el funciónamiento del filtro adaptativo |
| 2 | 23 | ?? | Tiempo de aceleración (dejar en cero a menos que sea necesario) |
| 5 | 17 | 3 | Modo de funcionamiento de la entrada CL (por flanco sin filtro) |
| 5 | 18 | 1 | Deshabilita la entrada de inhibición de pulsos de entrada |
| Opcionales | |||
| 4 | 31 | 10 | In Position Range. Tolerancia en pasos para encender bit INP |
| 4 | 32 | 1 | In Position Output Set Mode. Indica como enciende el flag INP |
| Autor: Fernando Polverini 15/02/2014. |